1/6 Scale Drivers
(Page 1)
Building scale drivers has been a fun and creative process. Unless you stick with the same 1/6 action figure, everyone will be different. Not that that's a bad thing but when you tear them down to put in a micro servo you have to start from scratch for each one.
Each body that I have is designated either a pilot or a co-pilot. I have the pilot's servo wired to respond to the same input signal direction as the front steering and the steering wheel of course, but with the co-pilot I have wired the input to turn the opposite direction, thus breaking up the choreographed appearance.

v
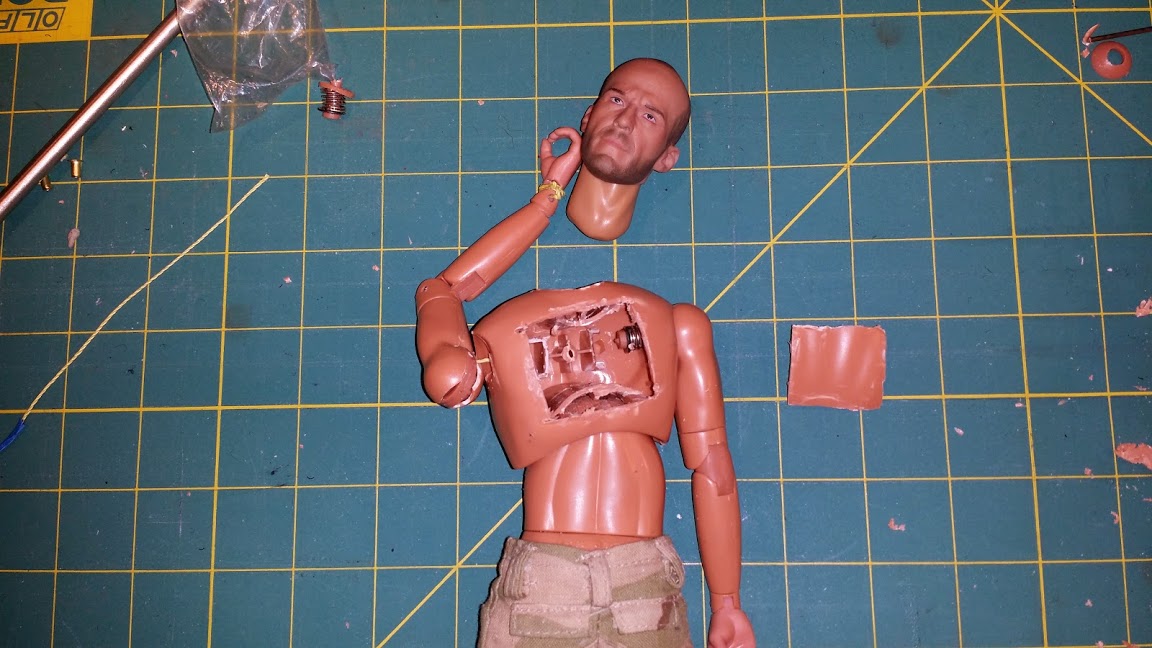
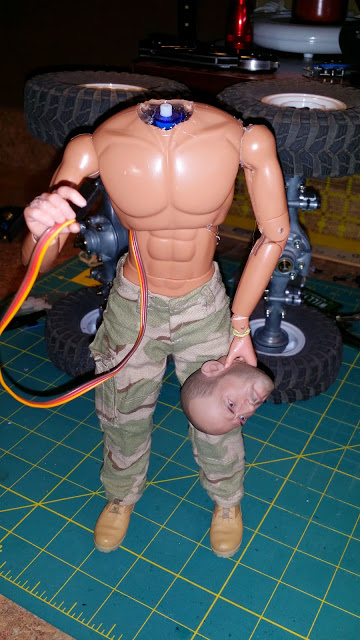
You can see in this photo I have already loosened the left arm joints on this driver and strung in a piece of Kevlar string to keep it in place. Once his hand is attached to the steering wheel, you don't want any resistance against the steering wheel servo.
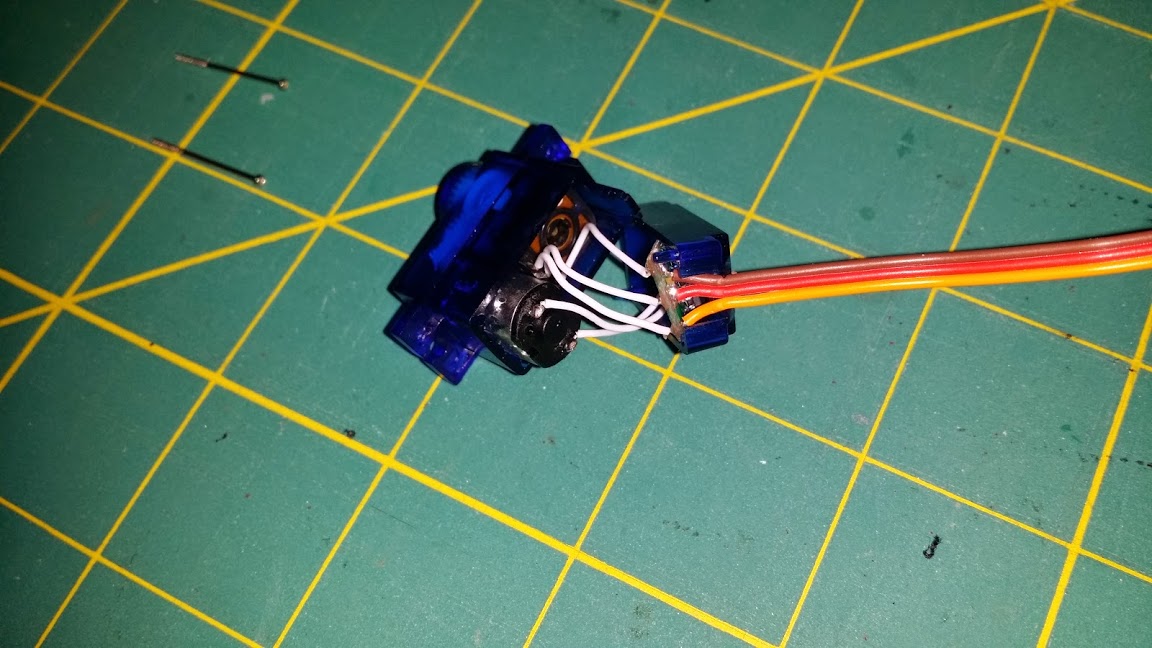
*Pro tip* Always verify the direction of your servo. On this one the head would have been turning the wrong direction, it's WAY easier to do it now than to have to tear the entire project apart to fix it.